Strumenti Utente
Bus CAN
Il Controller Area Network (CAN) è un bus standardizzato in tempo reale per la trasmissione di dati seriali. È uno dei bus di campo.
Il bus CAN è stato sviluppato da Bosch per le applicazioni automobilistiche, ma viene utilizzato anche nei settori dell'automazione e della tecnologia di produzione. Per i modelli di veicoli dal 2008 in poi, l'OBD-2 viene generalmente utilizzato tramite CAN.
Il vantaggio del bus CAN rispetto al cablaggio convenzionale è che non è necessario utilizzare un cavo separato per ogni segnale; i segnali o i valori misurati vengono invece trasmessi in serie su un cavo a due fili intrecciati. La lunghezza massima del cavo CAN dipende dalla velocità di trasmissione; a 1 Mbit/s è di circa 40 m, a 500 kbit/s è possibile raggiungere circa 100 m, a 125 kbit/s circa 500 m.
Esistono diverse versioni fisiche del bus CAN:
- CAN a bassa velocità, dove le tensioni recessive sono 5 V e 0 V, mentre le tensioni dominanti sono circa 0,7 V (CAN_LOW) e 4,3 V (CAN_HIGH). Velocità di trasmissione fino a 125 kBit/s. Cornici CAN da 8 byte. Ricetrasmettitori CAN speciali (ad es. TJA1054/TJA1055) possono gestire il funzionamento a singolo filo oltre al normale CAN a bassa velocità (2 fili di segnale con trasmissione differenziale).
- CAN ad alta velocità, dove la tensione recessiva è di 2,5 V, mentre le tensioni dominanti sono di circa 1,4 V (CAN_LOW) e 3,6 V (CAN_HIGH). Velocità di trasmissione da 40 kBit/s a 1 MBit/s. Cornici CAN da 8 byte.
- CAN-FD, simile all'High-Speed CAN, dopo la fase di arbitraggio come per l'High-Speed CAN, la velocità di trasmissione dei dati utente viene aumentata per una trasmissione più rapida. Cornici CAN di dimensioni fino a 64 byte.
Nell'indirizzamento dei messaggi CAN si distingue tra CAN 2.0A (ID a 11 bit) e CAN 2.0B (ID a 29 bit).
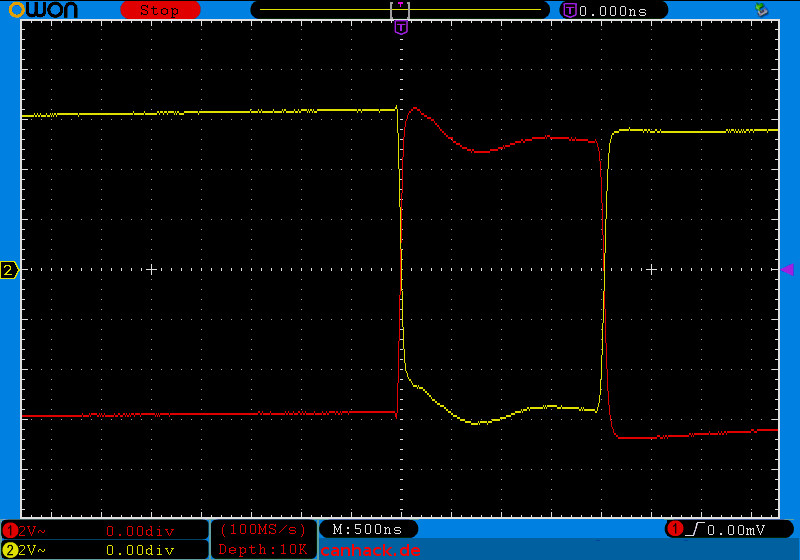
Esempio di CAN ad alta velocità a 500kBit/s con ID a 11 bit (CAN 2.0A) su un'unità di controllo motore:
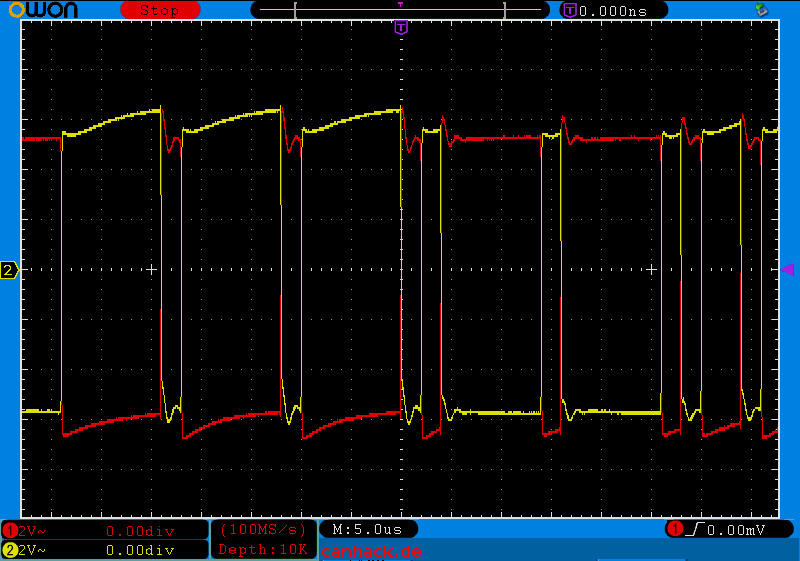
Come si può notare, CAN-H e CAN-L sono in antifase. Il vantaggio è che in questo modo si eliminano le interferenze di modo comune:
Di solito nel veicolo sono presenti diversi bus CAN, ad esempio CAN drive, CAN comfort e CAN infotainment, che collegano le unità di controllo dei gruppi funzionali. Le velocità dei bus CAN installati nel veicolo non sono generalmente le stesse; l'unità di controllo CAN gateway collega i vari bus CAN e fornisce anche la diagnostica CAN per il gruppo VAG, che viene poi collegato a presa OBD-2 . In alcuni veicoli (modelli Ford), l'unità CAN, ad esempio, è anche collegata direttamente alla presa OBD-2 . Un collegamento fisico molto diffuso per il CAN è anche cia-ds102-1 .
Esempio di messaggi CAN registrati (sniffing del bus CAN) con Kaufmann Automotive GmbH KCANMonitor:
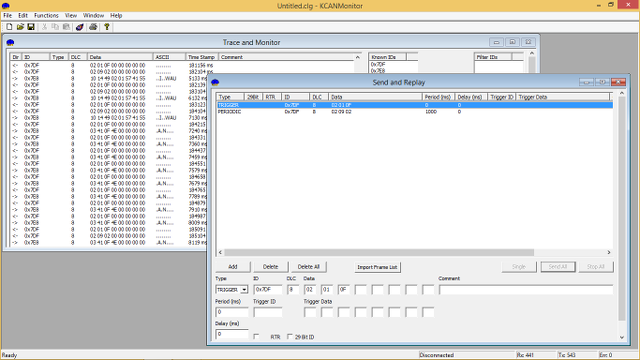
A seconda della velocità e del carico del rispettivo bus CAN, può accumularsi un gran numero di messaggi che devono essere elaborati sul bus durante lo „sniffing“. Per arginare in qualche modo il flusso di messaggi, KCANMonitor consente di impostare filtro CAN bus direttamente nell'interfaccia CAN.
Il CAN è utilizzato nella maggior parte dei veicoli dal 2008 in poi per la diagnostica di bordo con il protocollo OBD-2 . Nei veicoli commerciali, J1939 è ampiamente utilizzato per la diagnostica, nel settore marittimo NMEA .
Link sull'argomento: