Outils pour utilisateurs
Bus CAN
Le Controller Area Network (CAN) est un bus standardisé en temps réel pour la transmission de données en série. Il fait partie des bus de terrain.
Le bus CAN a été développé par Bosch pour les applications automobiles, mais il est également utilisé dans les domaines de l'automatisation et de la technique de production. Pour les modèles de véhicules à partir de 2008, l'OBD-2 est généralement utilisé via le CAN.
L'avantage du bus CAN par rapport à un câblage traditionnel réside dans le fait qu'il n'est pas nécessaire d'utiliser un câble distinct pour chaque signal, mais que les signaux ou les valeurs de mesure sont transmis en série sur un câble à deux fils torsadés. La longueur maximale de la ligne sur le CAN dépend du débit binaire de transmission, à 1 Mbit/s, elle est d'environ 40 m, à 500 kBit/s, il est possible de parcourir environ 100 m, à 125 kBit/s, environ 500 m.
Il existe différentes versions physiques du bus CAN:
- Low-Speed CAN, ici les tensions récessives sont de 5 V et 0 V, les tensions dominantes sont d'environ 0,7 V (CAN_LOW) et 4,3 V (CAN_HIGH). Débits binaires allant jusqu'à 125 kBit/s. Trames CAN de 8 octets. Des émetteurs-récepteurs CAN spéciaux (par ex. TJA1054/TJA1055) maîtrisent non seulement le CAN normal à faible vitesse (2 fils de signal avec transmission différentielle), mais aussi le mode monofilaire.
- CAN à haut débit, ici la tension récessive est de 2,5 V, les tensions dominantes sont d'environ 1,4 V (CAN_LOW) et 3,6 V (CAN_HIGH). Débits binaires de 40 kBit/s à 1 MBit/s. Trames CAN à 8 octets.
- CAN-FD, similaire à High-Speed CAN, après la phase d'arbitrage comme pour High-Speed CAN, le débit binaire est augmenté pour une transmission plus rapide des données utiles. Jusqu'à 64 octets de trames CAN.
On distingue l'adressage des messages CAN selon CAN 2.0A (11Bit ID) et CAN 2.0B (29Bit ID).
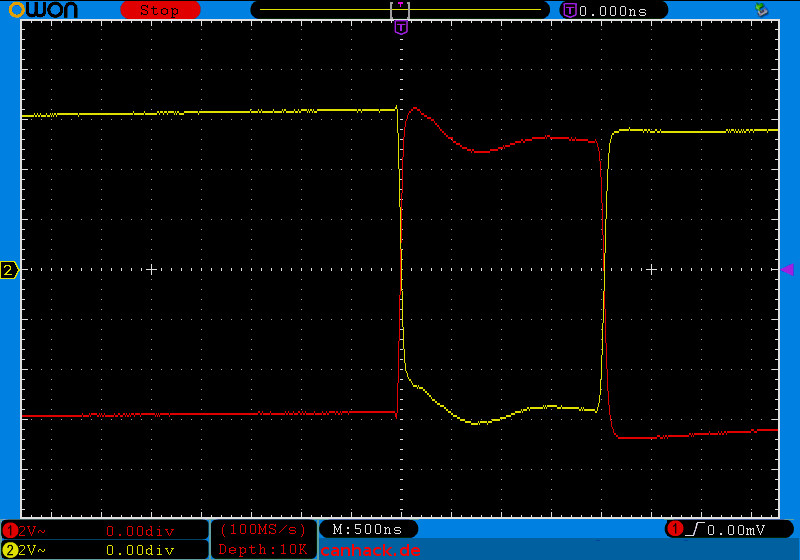
Exemple d'un CAN à haut débit de 500kBit/s avec 11 Bit ID (CAN 2.0A) sur un appareil de commande de moteur:
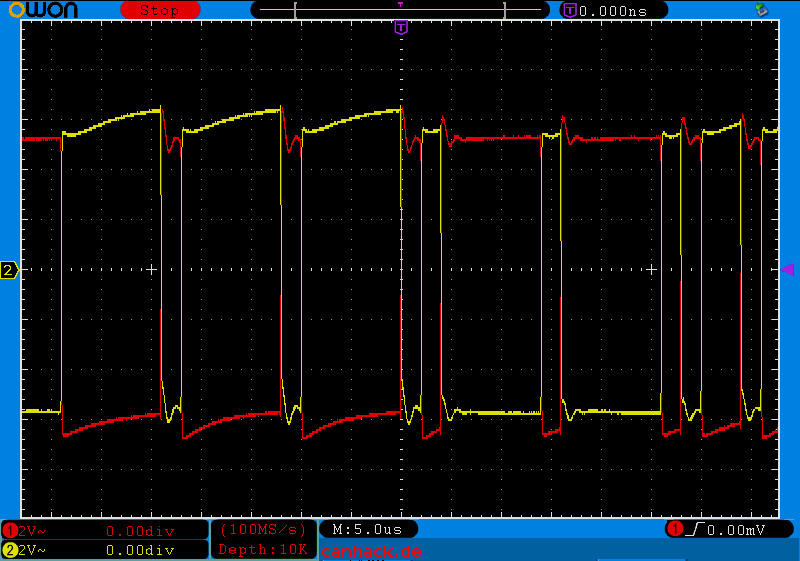
Comme on peut le voir, CAN-H et CAN-L sont en opposition de phase. L'avantage est que cela permet d'éliminer les perturbations de mode commun:
La plupart du temps, le véhicule est équipé de plusieurs bus CAN, par exemple CAN-Training, CAN-Confort et CAN-Infotainment, qui relient chacun les calculateurs de groupes fonctionnels. Les vitesses des bus CAN installés dans le véhicule ne sont généralement pas les mêmes, le calculateur CAN Gateway relie les différents bus CAN et met également à disposition le diagnostic CAN dans le cas du groupe VAG, qui est alors appliqué à obd-2-buchse. Sur certains véhicules (modèles Ford), l'entraînement CAN, par exemple, est aussi directement relié à la prise obd-2. Une connexion physique populaire pour CAN est également cia-ds102-1.
Exemple de messages CAN enregistrés (CAN-Bus Sniffing) avec Kaufmann Automotive GmbH KCANMonitor:
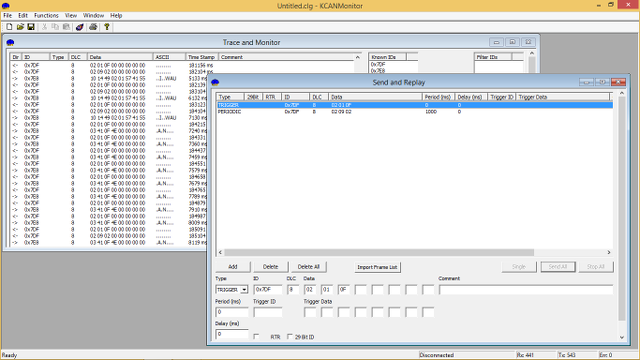
Selon la vitesse et la charge du bus CAN, un grand nombre de messages peuvent s'accumuler et être traités lors du “sniffing” sur le bus. Pour pouvoir endiguer quelque peu le flot de messages, KCANMonitor permet de définir can-filtern directement dans l'interface CAN.
CAN est utilisé sur la plupart des véhicules à partir de 2008 pour le diagnostic embarqué avec protocol obd-2. Pour les véhicules utilitaires, J1939 est répandu pour le diagnostic, dans le domaine maritime NMEA.
Pour communiquer sur un bus CAN, il faut utiliser au moins deux nœuds. Comme un message envoyé doit être confirmé par un récepteur dans le bit ACK, le contrôleur émetteur envoie un drapeau d'erreur si le message n'a pas été correctement vérifié par ACK.
Liens sur le sujet: